研究动机(问题)
考虑到遥感影像中的目标类型通常与它们所处的场景密切相关。文中作者通过组合用于目标检测的场景-上下文信息,提出了一种用于遥感影像目标检测的CNN网络。作者提出了三个创新点。
- 场景-上下文特征金字塔网络。旨在加强目标与场景之间的关系,解决目标变换大引起的问题。
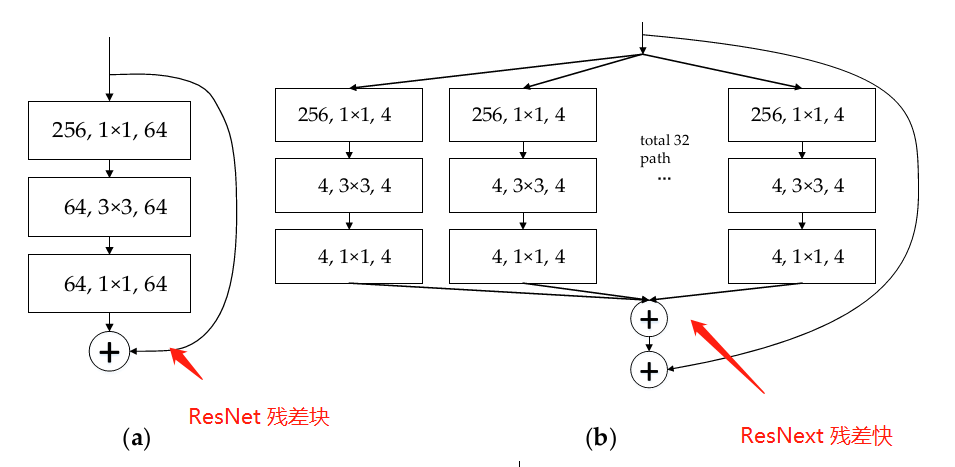
- 提出一个新的backbone,利用聚合残差模块(
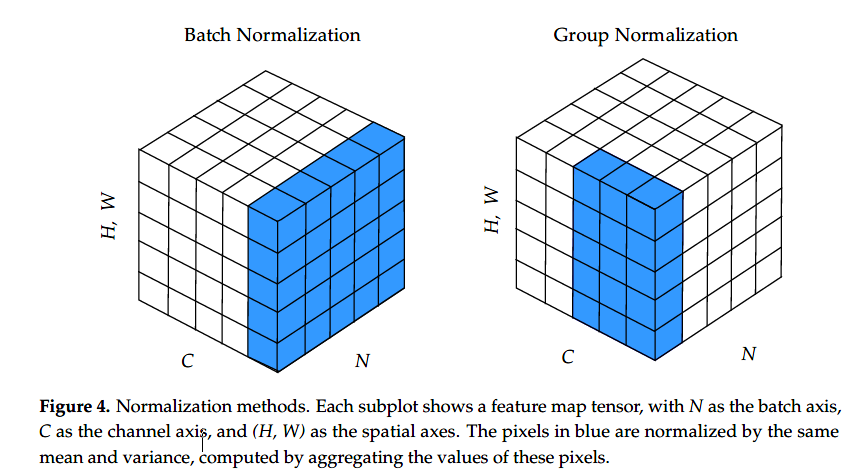
aggregated residual block)来增加感受野,为目标(尤其是小目标)提供更丰富的信息,提高网络的特征提取能力。 - 为了进一步提升网络的性能,作者使用组归一化(
Group Normalization)代替批量归一化Batch Normalization,解决了批量归一化的局限性。
与自然图像相比,基于CNN的方法具有若干局限性:
- 在遥感影像中,需要从多个场景(机场,国家,河流等)中检测目标,这增加了目标检测的难度。
- 与自然图像相比,遥感影像中标注的样本数量较少,这使得网络收敛变得困难。
- 遥感影像呈透视图,其目标尺度的变化范围要比自然图像大。
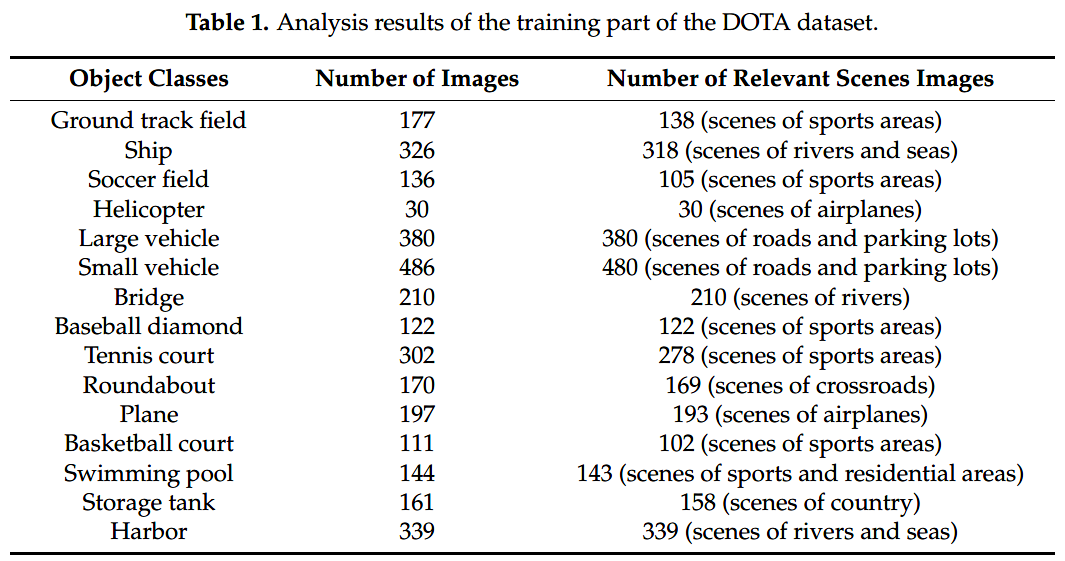
统计分析了遥感影像中的目标与场景的相关性:
提出的方法(Proposal Method)
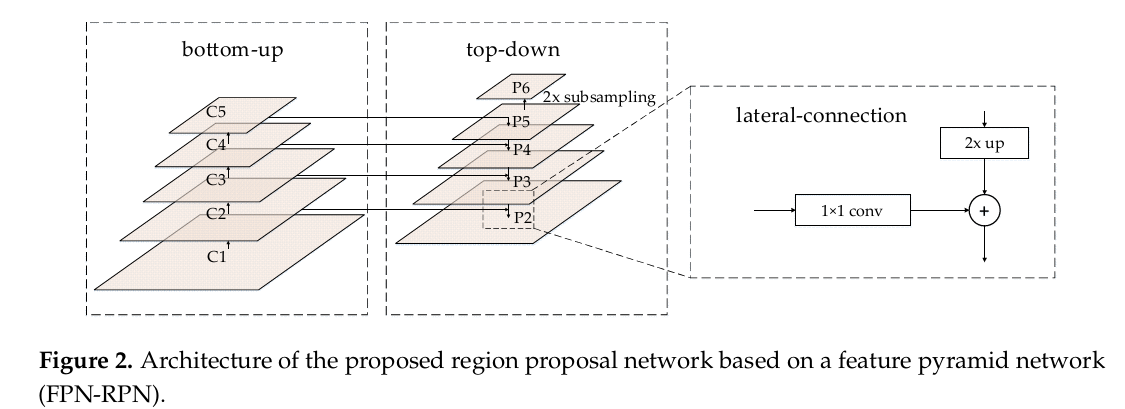
SCFPN 框架:SCFPN框架由两部分构成:一个基于特征金字塔网络用来生成多尺度的RoI 的RPN(FPN-RPN)和一个用于对RoI 分类的场景-上下文特征融合网络。具体来说,在FPN-RPN,首先生成每个输入图像的多尺度特征融合的特征图,然后使用FPN-RPN生成多尺度的RoIs。在场景-上下文特征融合网络中,首先利用骨干网络提取场景上下文和生成多尺度的RoI,然后通过组合它们来融合特征,最后使用分类器处理RoI的类预测。
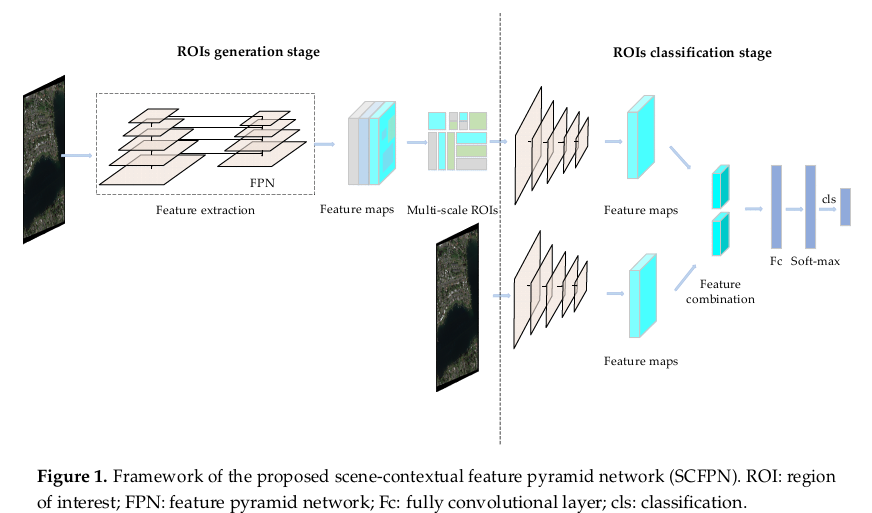
SCFPN Framework
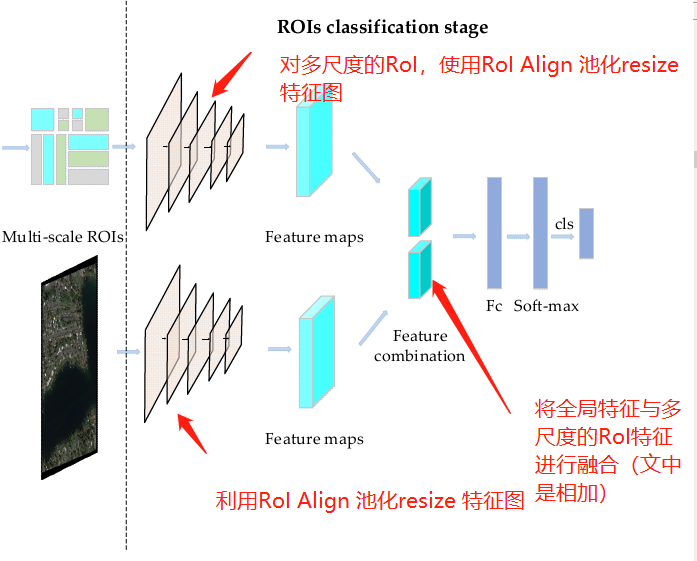
首先使用FPN-RPN网络提取多尺度的RoI,然后使用骨干网络提取全局图像特征和多尺度RoI特征。为了解决特征尺寸不匹配的问题,使用RoI Align 池化来 resize 特征,最后将全局特征和多尺度RoI特征进行融合。
损失函数: \(L\left(\left\{p_{j}\right\},\left\{t_{j}\right\}\right)=\frac{1}{N_{c l s}} \sum_{j} L_{c l s}\left(p_{j}, p_{j}^{*}\right)+\lambda \frac{1}{N_{r e g}} \sum_{j} p_{j}^{*} L_{r e g}\left(t_{j}, t_{j}^{*}\right)\)
\[L_{cls}(p, 1)=-\log {pl}\] \[L_{r e g}\left(t_{j}, t_{j}^{*}\right)=\operatorname{smoothL1}\left(t_{j}-t_{j}^{*}\right)\] \[\operatorname{smoothL1}(x)=\left\{\begin{array}{c}{0.5 x^{2}, \text { if }|x|<1} \\ {|x|-0.5, \text { otherwise }}\end{array}\right.\]Backbone Network
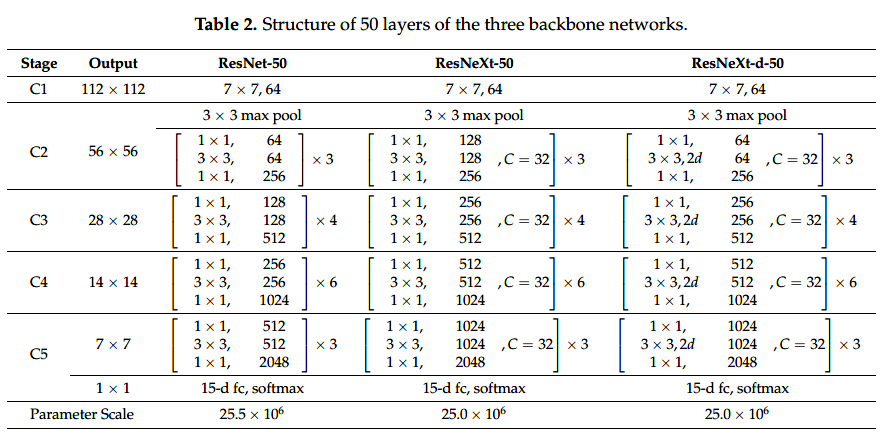
作者使用ResNext 块并引入扩张卷积来获得称为ResNext-d的组合结构,其扩大了感受野并增强了对小目标的感知。

Group Normalization
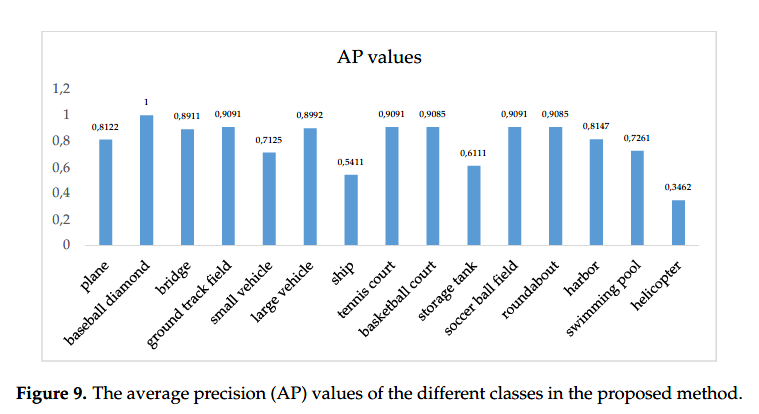
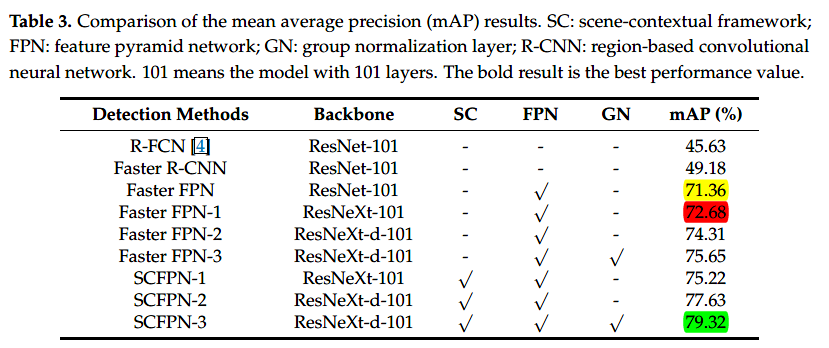
实验结果