非极大抑制(Non-Maximum Suppression,NMS)
非极大抑制(Non-Maximum Suppression, NMS),顾名思义就是机制不是极大值的元素,可以理解为局部最大搜索。这个局部代表的是一个领域,领域有两个参数可变,一个是领域的维数,另一个是领域的大小。
NMS在计算机视觉领域有着非常重要的作用,如食品跟踪,数据挖掘,3D重建,目标识别以及纹理分析等。本文主要关注其在目标检测领域的应用。
NMS 在目标检测中的应用
以人脸检测为例

目标检测算法会在目标的周围产生一些冗余的框,我们的目的是从这些冗余的框中提取出匹配目标最好的框。有多重方式可以解决这个问题,Triggs et al. 建议使用Mean-Shift算法,利用bbox的坐标和当前图片尺度的对数来检测bbox的多种模式,但是效果可能并不如使用分类器结合NMS算法的效果好。
NMS原理
对于Bounding box的列表B和其对应的置信度S,采用下面的计算方式。
- 选出具有最大score的检测框
M,将其从B集合中移除并加入到最终检测结果D中。 - 将
B中剩余检测框中与M的IoU大于阈值T(一般取0.3~0.5)的框从B中移除。 - 重复上述过程,直到
B为空终止。
在上述过程中用到了排序,即对B中的bbox按照置信度S进行排序。具体以一个例子说明。
如图中,目标检测算法在定位人脸的时候会找出一堆框,因此我们需要判断哪些检测框是没有用的。我们假设算法给出了六个框Bbox = {A,B,C,D,E,F},其对应的置信度为Score = {0.4,0.8,0.5,0.4,0.9,0.6}
- 首先将目标检测框列表
Bbox利用其对应的置信度Score进行排序。即Bbox={E,B,F,C,D,A}。 - 从列表
Bbox中选出置信度最大的框E,将其放置在列表Detect中,并将E从列表Bbox中删除,即得到Bbox={B,F,C,D,A}和Detect={E}。 - 计算
Bbox中剩余的框与E的重叠度IoU,并判断其是否大于某个设定的阈值,若大于则从Bbox中删除。假设C和D与E的IoU大于设定的阈值,则从Bbox中删除C和D。 - 接着取当前
Bbox中置信度最大的框B,重复2,3步骤操作,直至列表Bbox为空终止。
代码示例
- 单类
NMSPython cpu 版本代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
import cv2
import numpy as np
import matplotlib.pyplot as plt
def nms(bboxes,scores,thresh):
"""
bboxes -> [x1,y1,x2,y2] Nx4 输入的是左上和右下的坐标
scores -> Nx1
"""
x1 = bboxes[:,0]
y1 = bboxes[:,1]
x2 = bboxes[:,2]
y2 = bboxes[:,3]
order = scores.argsort()[::-1] # 对得分排序
areas = (x2 - x1 + 1) * ( y2 - y1 + 1) # 计算bbox的面积
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
# 计算当前概率最大矩形框与其他矩形框的相交框的坐标
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(0.0, xx2-xx1+1)
h = np.maximum(0.0, yy2-yy1+1)
inter = w * h # 计算交叠部分的面积
overlaps = inter/(areas[i] + areas[order[1:]] - inter) # 计算IoU
inds = np.where(overlaps<=thresh)[0]
order = order[inds+1]
return keep
if __name__ == "__main__":
img = cv2.imread("./demo.jpg")
bboxes = [[105, 165, 290, 350],
[150, 190, 340, 400],
[80, 140, 250, 320],
[153,130, 333, 330],
[70, 199, 243, 406]]
scores = [0.99, 0.6, 0.56, 0.7, 0.45]
img2 = np.copy(img)
bboxes = np.asarray(bboxes)
scores = np.asarray(scores)
keep = nms(bboxes, scores, 0.3)
new_bboxes = bboxes[keep]
new_scores = scores[keep]
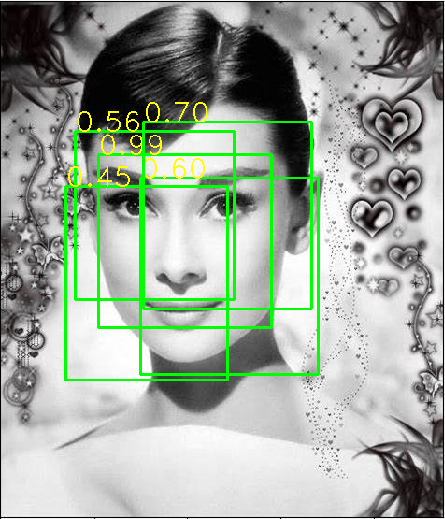
for i, box in enumerate(bboxes):
x1, y1, x2, y2 = box
cv2.rectangle(img,(x1,y1),(x2,y2),(0,255,0),2)
cv2.putText(img,'%.2f'%scores[i], (x1,y1), 2, 1, (255, 255, 0))
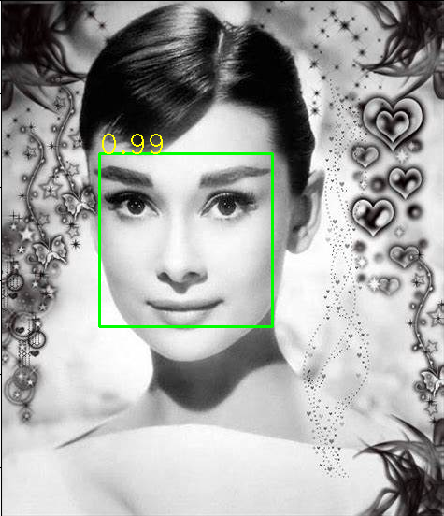
for i, box in enumerate(new_bboxes):
x1, y1, x2, y2 = box
cv2.rectangle(img2,(x1,y1),(x2,y2),(0,255,0),2)
cv2.putText(img2,'%.2f'%new_scores[i], (x1,y1), 2, 1, (255, 255, 0))
plt.figure()
plt.imshow(img)
plt.figure()
plt.imshow(img2)
plt.show()
上述代码只是针对单类目标进行NMS操作,如若想实现多类的NMS,只需要在外面套一层for 循环,每次对单一类别进行NMS,共进行类别数次。
Soft-NMS
上述NMS算法的一个主要问题是当两个ground truth的目标的确重叠度很高时,NMS会将具有较低置信度的框去掉(置信度改成0)
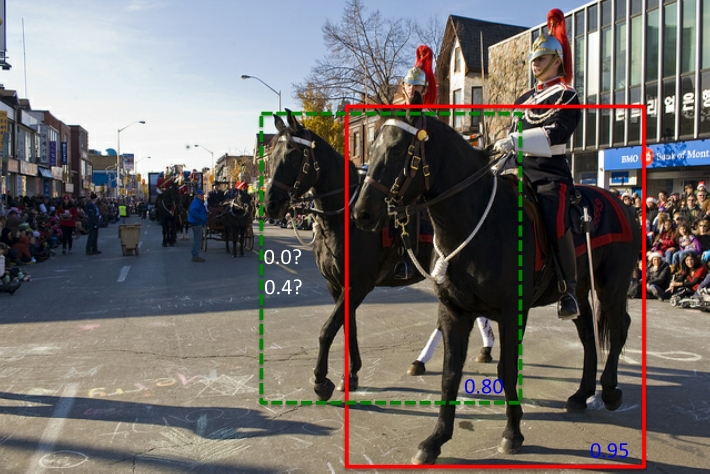
而soft NMS则是将和最大置信度重叠高于设定阈值的box的置信度降低。根据其IoU值,对重叠度高的置信度做一个基于连续函数的降值映射(decays the detection scores of all other objects as a continuous function of their overlap with Max)。NMS直接对score置0,当前高IoU的bbox就直接丢弃,而soft NMS只会降低当前bbox的score,不会丢掉。
伪代码如下,
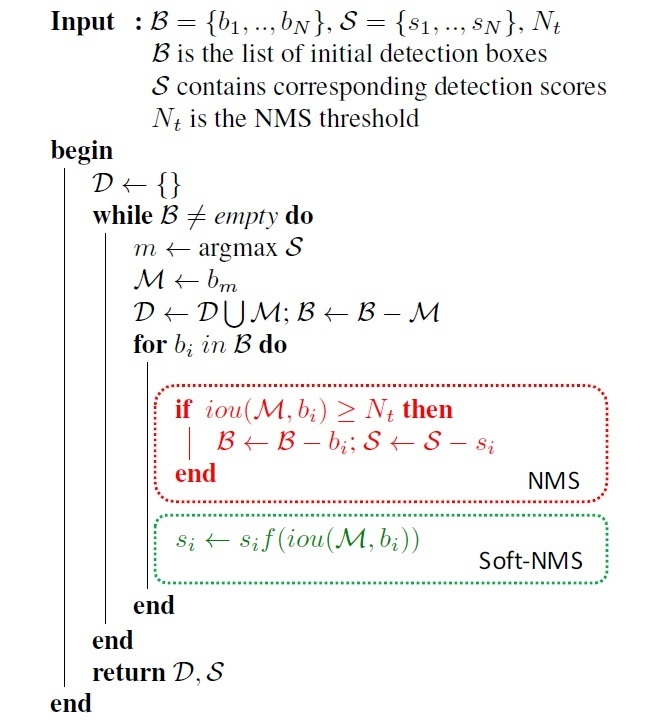
-
Previous
论文笔记:Libra R-CNN:Towards Balanced Learning for Object Detection -
Next
论文笔记:Class-Specific Anchor Based and Context-Guided Multi-Class Object Detection in High Resolution Remote Sensing Imagery with a Convolutional Neural Network